# Surveillance en temps réel de la position de l’arbre (pas de pertes de synchronisation)
# Contrôle en boucle fermée, contrôle variable du courant et du couple
# Protocole : CANopen, Modbus TCP, EtherNet/IP, Profinet
# Pilotage : fréquence et direction, ou mode séquence de mouvement
# Entrées/sorties opto-isolées 24 Vcc
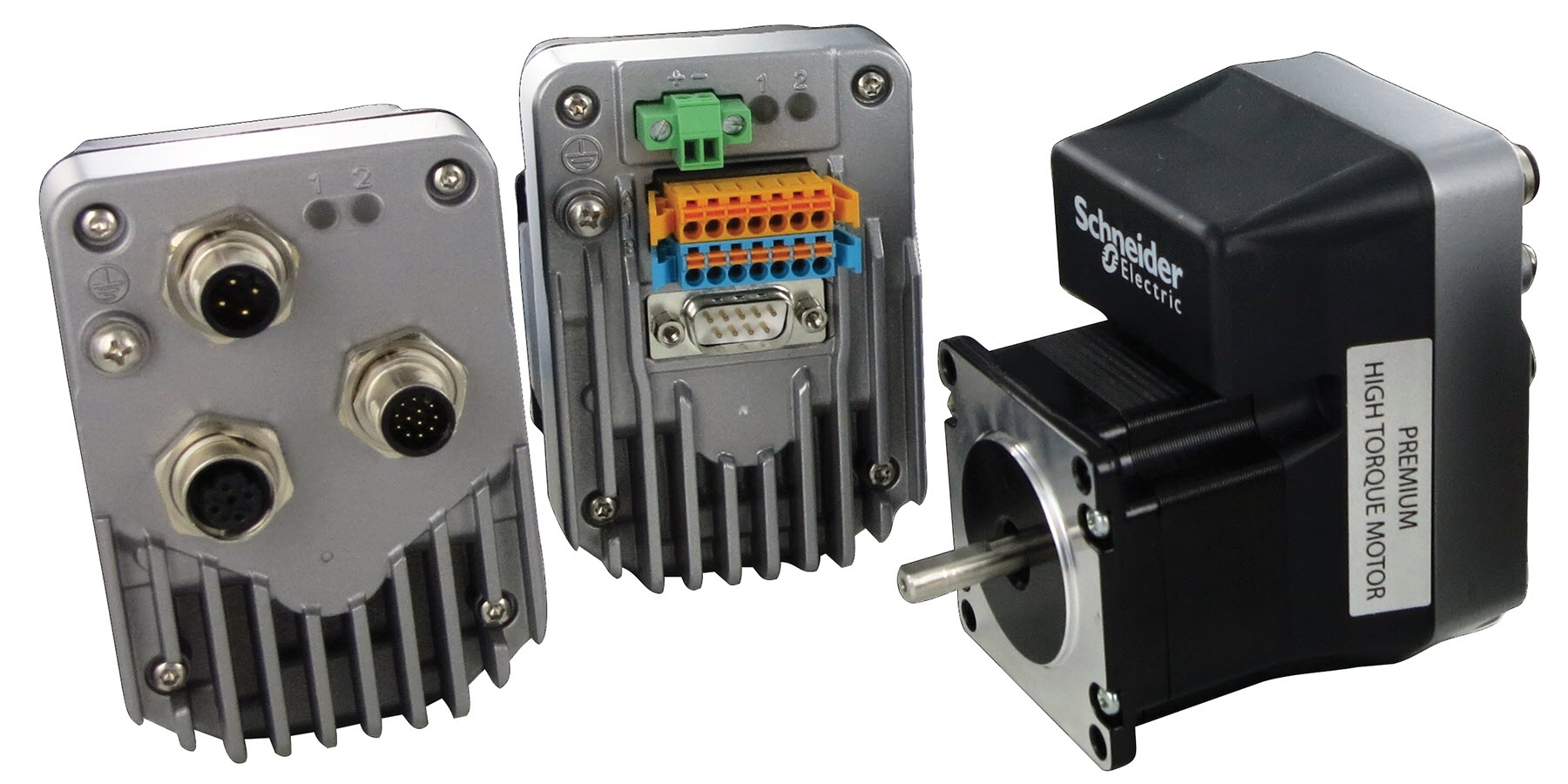
# Connectique industrielle (connecteurs M12) ou sur bornier
# Indice de protection : IP65
# Logiciel de programmation gratuit
Schneider Electric
http://schneider-electric.fr



