Depuis quelques années, les cobots, ou robots collaboratifs, font leur entrée dans les usines. Plus flexibles que les systèmes traditionnels, ils promettent de mettre la robotique à la portée du plus grand nombre. Mais de quoi s'agit-il réellement? L'usage concret des cobots n'est pas encore bien connu. « Le collaboratif est un terme très en vogue aujourd'hui , remarque Jacques Dupenloup,responsable des ventes chez Stäubli. De nombreux clients, qui parfois ne s'intéressaient pas à la robotique jusque-là, nous contactent pour savoir ce qu'ils pourraient faire d'un cobot ».
Comment se caractérise un cobot? « Au départ, le robot collaboratif a été conçu pour la proximité avec les opérateurs, rappelle Sylvain Acoulon, consultant sécurité en conception au Centre technique des industries mécaniques (Cetim). Il est donc doté d'une structure allégée, pour réduire les risques en cas de choc. De plus, il intègre des fonctions de sécurité dans son circuit de commande. » Historiquement, le premier modèle de ce type est le LBR de Kuka, qui signifie «Leichtbauroboter» (robot léger). « Mais il est resté très longtemps prin-cipalement un objet de laboratoire, en raison de son prix », rappelle Sylvain Acoulon. Puis Universal Robots est arrivé sur le marché et « a bousculé tout le monde, notamment les fabricants de robots traditionnels », retrace Sylvain Acoulon. « L'entreprise a été créée en 2005 au Danemark , raconte Adrien Poinssot, directeur commercial d'Universal Robots pour la France. L'idée venait de trois docteurs en robotique, qui cherchaient à répondre aux difficultés des usines de production danoises, qui comptent beaucoup de PME. Ils ont pour cela listé un certain nombre de défis à relever pour mettre au point la solution la plus adaptée, quels que soit la taille et le secteur des entreprises ».
Sécurisés et faciles à utiliser
Ainsi, les robots collaboratifs se veulent faciles à utiliser, et même à programmer, y compris par des opérateurs sans formation spécifique. Cela entraîne une flexibilité en termes d'applications: un même robot peut être déplacé et assigné facilement à différentes tâches. Leur légèreté et compacité facilitent l'intégration. Ils sont compatibles avec les espaces restreints, car ils n'imposent pas de reconfigurer l'atelier pour installer une cage comme le nécessitent les robots classiques. Leurs fonctions de sécurité les rendent capables de cohabiter et d'interagir avec l'humain. Toutes ces fonctionnalités sont en effet attrayantes pour les PME.Ainsi, les cobots sont par-fois utilisés dans des applications qui n'ont rien de collaboratives. « Pour une PME qui n'a besoin de ne faire faire au robot que des tâches très simples, comme déplacer une pièce, la flexibilité et la facilité de programmation des cobots sont très adaptées », note Sylvain Acoulon (Cetim).
Louer pour tester
Comment savoir si un robot collaboratif aurait sa place dans une usine? Le Centre technique des industries mécaniques (Cetim) répond à cette question en proposant à la location des cellules robotisées flexibles mobiles (CRFM). « Pour faire le premier pas,les industriels ont besoin de vérifier s'ils sont capables de prendre en main un tel système, justifie Sylvain Acoulon, consultant sécurité en conception au Cetim. Cela concerne essentiellement les PME,qui n'ont pas forcément les compétences nécessaires en interne.De plus, l'un des gros problèmes avec la robotique est l'incompréhension entre l'acheteur et l'intégrateur. » En ayant une expérience concrète de la machine, l'utilisateur est mieux à même d'expliquer à l'intégrateur ce dont il a besoin. Les cellules proposées par le Cetim utilisent des cobots d'Universal Robot ou de Stäubli. D'autres offres de ce type existent sur le marché, comme chez Isybot qui propose également ses machines à la location pendant 3 à 18 mois.
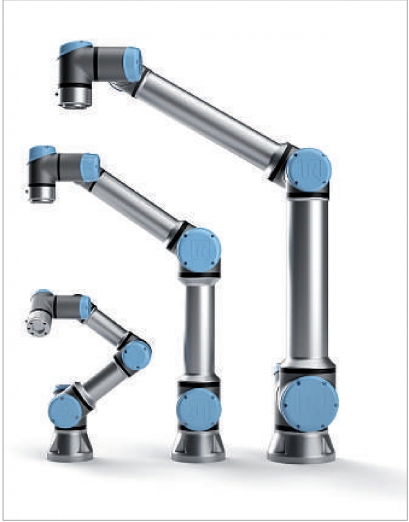
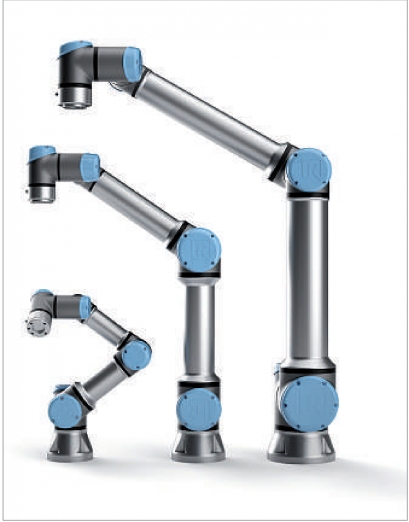
Une même gamme de robots collaboratifs propose en général différentes tailles et différentes charges utiles.
Universal Robots
Mais attention, « l'appellation“collaboratif” ne signifie pas qu'il n'y a rien àfaire ,conti-nue-t-il. Or une PME n'a pas toujours connaissance de la réglementation. Ces entreprises ont plus l'habitude d'acheter une machine et de l'utiliser. Mais en achetant un robot, elle endosse la responsabilité qui incombe généralement au constructeur de machine et n'appréhende pas toujours les questions de sécurité. » « Un robot est une quasi-machine , rappelle Emmanuel Bergerot, directeur commercial chez Kuka. Il faut prendre en compte l'ensemble de l'application et les risques qui y sont liés. » En effet, si un robot est pourvu d'un outil dangereux, sa dimension collaborative ne suffit pas à rendre l'application inoffensive. « De même, on ne peut pas effectuer n'importe quelle tâche à côté d'une personne , note Jacques Dupenloup (Stäubli). Manipuler une pièce lourde, par exemple, peut représenter un danger. Les clients n'y pensent pas toujours ».
Depuis 2016, les caractéristiques des robots collaboratifs sont encadrées par la norme ISO/TS 15066. Et en 2017, le ministère du Travail a publié un guide de prévention pour la mise en œuvre des applications collaboratives robotisées. Celui-ci décrit plusieurs niveaux de collaboration entre le robot et l'Homme. Il y est question de collaboration directe ou indirecte, ou de coexistence. « La collaboration directe est le cas le plus étroit, commente Emmanuel Bergerot (Kuka). L'Homme et le robot travaillent sur la même pièce, et l'opérateur peut toucher le robot pour le guider.Ici,il n'y a pas d'autre choix que d'utiliser un cobot. » « Ce cas de figure est encore très rare,car on ne pense pas à la collaboration quand on conçoit un produit et son procédé de fabrication », note Sylvain Acoulon (Cetim).
La collaboration indirecte décrit des actions alternées: l'Homme et le robot travaillent dans le même espace ou sur les mêmes pièces, mais sans se trouver au même moment au même endroit. « Ce cas de figure est plus courant, continue le consultant du Cetim. Il reste en effet beaucoup de choses où l'on a besoin de l'hu-main et que l'on ne peut pas robotiser.Le cobot s'acquitte alors des tâches lourdes, répétitives, tandis que l'humain utilise ses capacités d'analyse. » La coexistence correspond aux cas où chacun travaille de façon autonome, mais où l'Homme peut passer dans le champ d'action du robot.
« Ici, la question se pose , continue Emmanuel Bergerot (Kuka). A-t-on besoin d'un cobot ? Il est aussi possible d'utiliser des robots classiques avec des équipements de sécurité, tels que des scrutateurs, des radars ou des tapis, afin de détecter le passage d'une personne. » Le robot peut alors progressive-ment réduire sa vitesse, jusqu'à s'arrêter puis repartir lorsque la personne s'éloigne.
Enfin, le guide décrit également les cas d'assistance physique au geste ou à la manipulation par un robot guidé par l'opérateur. « C'est intéressant pour des questions d'ergonomie, précise Nicolas Couche, responsable des produits robotiques chez Fanuc. Pour porter des charges lourdes, par exemple, le robot fait le gros du travail, et l'opérateur se charge de le guider pour les mouvements plus fins. » La société Isybot a mis au point une machine de ponçage correspondant à ce cas de figure: « C'est une tâche pénible, en raison des vibrations, explique le p-dg, Yvan Measson. Mais savoir où poncer et pendant combien de temps relève du savoir-faire de l'opérateur. Le robot, lui, applique l'effort sur la pièce, de façon homogène. » Un cobot peut même être utilisé en fonction « zéro gravité » : « Il compense le poids d'une pièce pour que l'opérateur la manipule comme si elle n'avait que 1 % de sa masse réelle », précise Emmanuel Bergerot (Kuka).
Il est également possible de télécommander un cobot: c'est un cas d'usage prévu notamment par Isybot. « La prise en main à distance est utile pour les environnements difficiles,comme dans le cas d'opérations de désamiantage », précise Yvan Measson. En résumé, le robot se charge des tâches difficiles ou à faible valeur ajoutée, et l'homme garde celles qui nécessitent son expertise. « Auparavant, on ne pouvait automatiser qu'à 100 %,ou pas du tout, rappelle Emmanuel Bergerot (Kuka). Or, si 80 % d'une tâche est facile à automatiser, les 20 % restants sont beaucoup plus complexes, et donc coûteux, à faire. » En effet, si un opérateur peut effectuer rapidement un contrôle visuel, pour détecter par exemple la présence d'une vis, cela s'avère plus difficile pour un système automatique. De même, un humain est capable de prendre des décisions dans un cas imprévu. Le robot, non.
Certains fabricants se sont basés sur des robots existants pour les décliner en version collaborative, grâce à des sécurités supplémentaires.
Fanuc
La robotique collaborative invite donc à se demander où l'on veut placer le curseur de l'automatisation. Ainsi, même si un cobot est plus cher qu'un robot standard, le fait de ne pas avoir à automatiser une tâche à 100% peut réduire le coût global de l'application. Pour Emmanuel Bergerot, cette façon de fonctionner n'est pas toujours bien comprise, y compris par des professionnels de la robotique : « Quand les cobots sont arrivés sur le marché, certains intégrateurs les ont vus comme des robots standards avec des fonctions supplémentaires. Mais il vaut mieux penser différemment, en partant d'une feuille blanche. » « Avant de parler des technologies elles-mêmes, il est important de s'interroger sur les objectifs d'une application, bien hiérarchiser les besoins », conseille Philippe Bolliet, en charge de la division Automatismes chez Mitsubishi Electric. Faut-il privilégier la productivité? L'agilité des lignes de production? Les questions de flux, ou de sécurité?
Les cobots sont capables de répondre à de nombreuses applications, dans tous les secteurs industriels. « Le premier robot installé par Universal Robots, en 2008, dans une usine danoise,effectuait une tâche de chargement et déchargement de machine »,illustre Adrien Poinssot. Cet exemple représente un cas d'usage courant pour les robots collaboratifs. Mais la palette d'outils compatibles avec les robots collaboratifs est large. Universal Robots recense 150 applications possibles et propose des outils certifiés compatibles via sa plateforme UR+. Vissage, soudage ou palettisation font partie des travaux à la portée des cobots. Il est également possible de leur adjoindre des capteurs, comme des caméras 3D pour effectuer du contrôle dimensionnel ou reconnaître l'orientation d'une pièce. L'ajout d'un lecteur de codes-barres peut permettre l'identification d'un produit par le robot: ce type de capteurs adaptés a notamment été développé par Sick.
Des déplacements autonomes
Les robots collaboratifs peuvent être couplés à des véhicules à guidage automatique (AGV). Cela leur permet de se déplacer de façon autonome dans une usine. Cela représente plusieurs avantages. Les robots collaboratifs ont une envergure plus limitée que les robots classiques, pour des raisons de sécurité.
Cela peut s'avérer insuffisant pour certaines applications. « Dans l'automobile ou l'aéronautique,il faut parfois contrôler des pièces plus grandes que les robots eux-mêmes , explique Emmanuel Bergerot, directeur commercial chez Kuka, qui commercialise le robot mobile KMR iiwa.
Cela pose un problème d'accessibilité.Nous avons donc rendu le robot mobile. » Celui-ci peut ainsi contourner la pièce pour accéder à tous les points de contrôle. On obtient un rayon d'action infini dans le plan horizontal. Cette mobilité permet aussi de déplacer une pièce dans l'usine. « Beaucoup d'opérateurs prennent leur caisse de pièces quand elle est terminée, relève Jacques Dupenloup, responsable des ventes chez Stäubli. Ce sont des tâches qui peuvent générer des troubles musculosquelettiques et qui peuvent être robotisées. » De même, les opérations en logistique sont de plus en plus automatiques. En se déplaçant, un robot peut assurer une préparation de commande en allant chercher des pièces. Les robots mobiles peuvent aussi passer d'une application à une autre sans intervention humaine. « Lorsqu'il arrive à son poste, l'AGV effectue une procédure pour se recaler dans la position définie , décrit Jacques Dupenloup. Mais celui-ci n'étant pas suffisamment précis, c'est ensuite au robot de se recaler.La précision est alors équivalente à celle d'un robot fixe. » Le véhicule Helmo de Stäubli peut même se brancher de façon automatique pour recharger sa batterie et se débrancher avant de repartir. Bien sûr, pour qu'un robot soit mobile, il ne doit pas être dangereux. Les robots collaboratifs sont donc bien adaptés à ce type d'application. L'AGV doit ensuite garantir la sécurité des personnes circulant dans l'usine. « On ne programme pas une simple trajectoire,mais une application de navigation », précise Emmanuel Bergerot (Kuka). À partir d'une cartographie de l'usine, le véhicule doit gérer le contournement des obstacles fixes ou mobiles, détectés à l'aide de scrutateurs, ou prendre des trajectoires alternatives. « Le système peut aussi interagir avec son environnement en émettant des sons,ou via une connexion Bluetooth », ajoute Jacques Dupenloup (Stäubli).
Un robot est une quasi-machine : il nécessite l'ajout d'outils. L'analyse de risque doit donc prendre en compte le système global.
Isybot
Programmation manuelle et versatilité
La dangerosité de l'outil peut toutefois être une limite à son usage dans le cadre d'une application collaborative. Certains peuvent nécessiter des adaptations: « Un foret devra être rétractable quand le robot se déplace », illustre Nicolas Couche (Fanuc). Les outils de découpe, qu'il s'agisse d'un disque ou d'une torche plasma, ne seront pas forcément possibles à intégrer. « On risque de revenir à des cellules fermées, prévient Yvan Measson (Isybot). Le robot ne peut pas assurer la sécurité d'un système de découpe laser, par exemple. » Là encore, tout dépend de l'analyse de risque. Mais le danger de telles applications entraîne une complexité de mise en œuvre qui risque de faire perdre l'intérêt que peuvent représenter les robots collaboratifs. Contrairement aux robots traditionnels, les cobots présentent l'avantage de la versatilité. « C'est une problématique récurrente pour les PME, qui ont souvent beaucoup de références, de changements de produits », note Nicolas Couche (Fanuc). Les ro-bots collaboratifs peuvent être programmés manuellement: l'opérateur lui fait alors prendre les différentes positions nécessaires à l'application pour les enregistrer, sans avoir à noter de coordonnées. « Apprendre une nouvelle action, de type pick-and-place, ne requiert donc qu'une heure , estime Adrien Poinssot (Universal Robots). L'ajout d'un capteur se fait également de façon intuitive. On le branche sur le contrôleur, et on intègre une instruction dans le robot. » Bien sûr, la complexité de la programmation dépend de l'application.
Analyser les risques pour assurer la sécurité
La facilité d'installation et de programmation des robots collaboratifs ne dispense pas de l'analyse de risque.
Malgré leur masse et leur vitesse réduites, ils peuvent représenter un danger. L'analyse de risque prend en compte les préhenseurs et l'outillage du robot. « C'est normalement à l'intégrateur, formé spécifiquement,d'évaluer le niveau Pl et SIL en fonction de tous les risques présents sur l'installation », indique Nicolas Couche, responsable des produits robotiques chez Fanuc.
Le Centre technique des industries mécaniques (Cetim) permet aussi d'orienter les entreprises: « Nous pouvons indiquer s'il faut par exemple revoir le process de fabrication,pour moins exposer les personnes , explique Sylvain Acoulon, consultant sécurité en conception au Cetim. Il y a des compromis à faire pour répondre au mieux au besoin,tout en garantissant la sécurité. » Les solutions pour sécuriser les robots collaboratifs sont diverses. Pour l'environnement, des radars ou des scrutateurs permettent de déterminer des zones en volume, dans lesquelles on adaptera la vitesse en cas de présence d'une personne. Mais les robots eux-mêmes peuvent disposer de différentes caractéristiques liées à la sécurité, comme des aménagements mécaniques pour éviter les pincements, des codeurs sécurisés, des freins, ou encore de la redondance. L'un des éléments nécessaires est le capteur d'effort: « Dès que le robot rencontre un seuil d'effort inattendu,il va adopter le comportement le plus adéquat , décrit Emmanuel Bergerot, directeur commercial chez Kuka. Il peut s'arrêter,mais aussi devenir“mou”, pour éviter les coincements, ou encore reculer.L'analyse de risque peut mettre en lumière des circonstances qui demandent des réactions différentes.
Cela nécessite une très grande finesse dans le comportement. » Chez Stäubli, la détection de contact est faite grâce à une peau sensible à la dépression de l'air, qui recouvre entièrement les robots collaboratifs.
« La programmation manuelle ne permet pas de gérer les modes de marche, précise Nicolas Couche (Fanuc). Elle convient aux applications basiques,mais ne permet pas de faire face à un problème de positionnement, ou à une pièce qui tombe. » De même, la gestion des interactions avec les opérateurs doit passer par une programmation plus détaillée. Cependant, même les approches plus classiques de la programmation évoluent vers plus de simplicité. « La facilité d'utilisation est l'un des critères clés recherchés par nos clients », argumente Philippe Bolliet (Mitsubishi Electric) Qu'il s'agisse de robots collaboratifs ou non, « tous les roboticiens vont dans ce sens », commente Jacques Dupenloup (Stäubli). Cela passe notamment par l'usage d'interfaces tactiles en guise de consoles, et d'un langage plus intuitif, plus facile à appréhender par les opérateurs ou les régleurs. L'accessibilité dépend également des langues disponibles, pour le robot comme pour les formations. Cependant, en cobotique, « on ne développe pas de fonctions aussi pointues qu'avec des robots classiques , ajoute Philippe Bolliet (Mitsubishi Electric). Dans l'idéal,un cobot devrait donc pouvoir être monté par un industriel seul, sans avoir obligatoirement recours à une société tierce ». La facilité de programmation permet d'attribuer des tâches différentes à un même robot. Cela implique de pouvoir le déplacer: c'est une autre caractéristique des cobots. « On les rentabilise plus facilement en leur faisant faire des choses différentes », note Sylvain Acoulon (Cetim). Pour cela, le robot peut être monté sur un chariot, manuel ou automatique ( voir encadré page 52 ). Kuka a par exemple développé à cet effet le flexFellow, une servante mobile dotée d'un plateau et de roues, sur laquelle s'intègre un robot. « Il est possible de le verrouiller dans une position géométrique répétable », indique Emmanuel Bergerot. Ce type d'usage n'est pas incompatible avec la précision: « La position peut être recalée avec une caméra , expliqueAdrien Poinssot (Universal Robots). On peut aussi très simplement montrer au robot le point qui nous intéresse. » « Mais attention, chaque application peut présenter des risques différents , prévient Nicolas Couche (Fanuc). Pour chacun des usages, il faut évaluer les risques spécifiques ».
Les robots collaboratifs sont facilement déplaçables. Certains sont même compatibles avec des véhicules autonomes.
Kuka
Si les cobots ont des avantages, ils ont également leurs limites. La principale est leur vitesse: « En mode collaboratif, on admet généralement 250 mm/s comme la vitesse en dessous de laquelle l'opérateur va pouvoir se dégager », explique Yvan Measson (Isybot). Mais la vitesse admissible dépend de l'énergie de l'impact en cas de collision. Ainsi, plus la charge portée sera lourde, plus le danger sera important en cas de choc. Même sans collisions, la vitesse peut avoir un impact sur les travailleurs: « Nous avons limité la vitesse de notre robot à 1 m/s, car des essais faits par les constructeurs automobiles ont montré qu'une vitesse plus élevée générait un stress important auprès des opérateurs », précise Yvan Measson. Il s'agit donc d'un facteur clé du point de vue de l'acceptabilité des robots collaboratifs.
Les questions à se poser
Comment savoir si un cobot a sa place dans une usine? Comment le choisir? Pour faire avancer la réflexion, il est utile de se poser les questions suivantes:
l La production est-elle variable? Si les pièces produites changent souvent, un cobot peut s'y adapter facilement. La production d'une pièce unique, en revanche, justifie plutôt l'usage d'un robot traditionnel, plus rapide et plus spécialisé.
l Faudra-t-il faire évoluer le robot? Certains robots peuvent fonctionner sur des applications collaboratives, tout en étant capables d'assurer des fonctions plus traditionnelles à vitesse élevée.
l Quelle est la place disponible? Si l'organisation d'un atelier ne peut pas être chamboulée pour l'installation d'un robot, alors un cobot peut être la solution. Il ne nécessite en effet pas de cellule fermée et peut fonctionner à proximité des travailleurs.
l Quelles sont les interactions nécessaires avec les opérateurs? Selon leur nature et leur fréquence, un cobot peut s'avérer utile ou pas. Le passage ponctuel d'un opérateur à proximité d'un robot classique est envisageable, avec des solutions de sécurité adaptées. S'il faut travailler avec le robot sur une même pièce, alors l'option collaborative est nécessaire.
l Quelles tâches sont à automatiser? La possibilité de collaboration nécessite de penser la répartition du travail entre l'humain et le robot. Ce dernier peut s'acquitter des tâches les plus pénibles, tandis que certaines nécessitent une expertise humaine, et sont complexes à robotiser.
« Mais lorsque l'on automatise, on vise une productivité plus importante, rappelle Emmanuel Bergerot (Kuka). Or les cobots, même à vitesse maximale, peuvent ne pas être assez rapides.Il faut donc bien analyser l'application afin de savoir s'il est important d'utiliser un robot collaboratif. » En effet, si le passage d'un opérateur à proximité du robot n'est que ponctuel, alors un robot classique, doté des systèmes de sécurité adéquats,peut convenir.Il ralentira,puis s'arrêtera lorsqu'une personne s'en approchera. « Aujourd'hui, des radars permettent tout à fait d'utiliser des robots classiques sans barrières », confirme Nicolas Couche (Fanuc). À l'avenir, la frontière entre robots et cobots pourrait disparaître : Stäubli, par exemple, compte faire évoluer l'ensemble de sa gamme de robots pour les doter des mêmes systèmes de sécurité que ses modèles collaboratifs. Mitsubishi Electric, avec son cobot Melfa en cours de développement, a pour objectif d'offrir la possibilité d'atteindre des vitesses supérieures aux vitesses collaboratives.
Comprendre les limites et le comportement
La frontière entre robots classiques et cobots pourrait à l'avenir se dissiper, grâce à l'ajout de certains équipements de sécurité comme les capteurs d'effort.
Stäubli
Les robots collaboratifs se caractérisent notamment par leur facilité d'utilisation. Certains permettent de programmer un mouvement manuellement.
Mitsubishi Electric
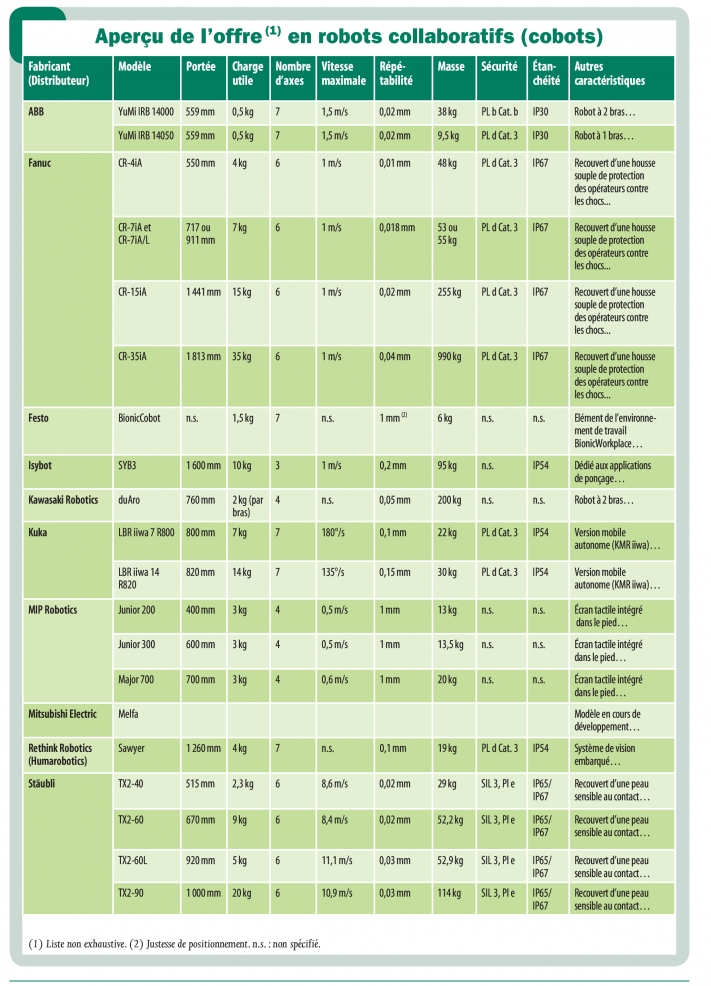
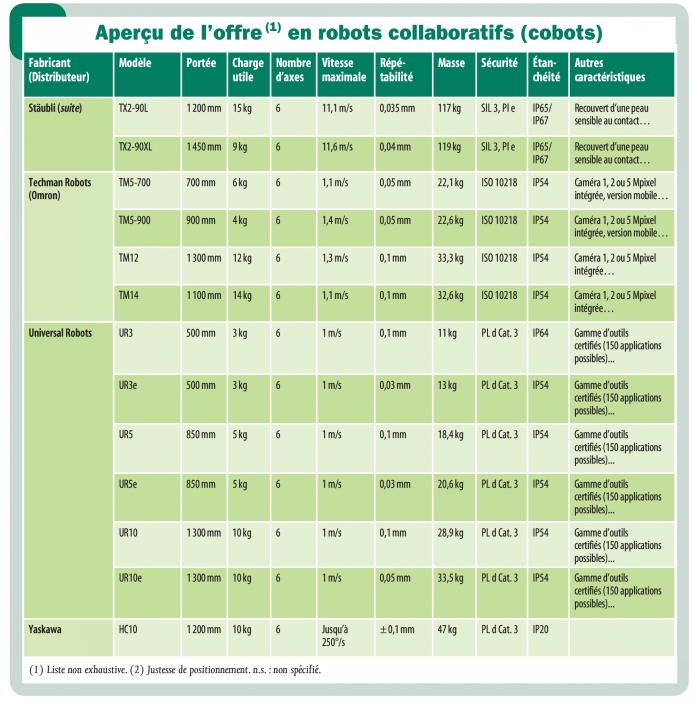
Les cobots présentent d'autres limites par rapport aux robots traditionnels. La charge utile qu'ils sont capables de porter est plus réduite, jusqu'à 10kg généralement. Le modèle CR-35iA de Fanuc monte à 35kg. Leur rayon d'action, lui, est plus court: à partir de 400mm, avec le Junior 200 de MIP Robotics, et jusqu'à 1 813 mm pour le CR-35iA. Enfin, la répétabilité des mouvements n'est pas la même: « Il faut se dire que la tâche du cobot vient en complément du travail fait par un opérateur, justifie Adrien Poinssot (Universal Robots). La précision reste importante, mais, pour une tâche manuelle, on n'attend pas qu'elle atteigne le micron.Nos cobots permettent une répétabilité de 3 à 5 centièmes de millimètre. » Mitsubishi Electric a pour ambition de doter son cobot Melfa d'une répétabilité équivalente aux robots classiques. Pour être exploité de façon optimale, un cobot doit être bien compris par les opérateurs. « Il ne faut pas sous-estimer l'importance du fait de donner des informations aux utilisateurs, estime Emmanuel Bergerot (Kuka). Un robot est un concentré de technologie, et l'opérateur ne sait pas tout ce qui a été fait en termes de programmation. » Ainsi, ne pas pouvoir bien identifier le comportement d'un robot peut être une source de stress. Si le mouvement s'arrête, est-ce normal ou dû à une panne? Quand va-t-il se remettre en marche? Pour que les utilisateurs se sentent en confiance, Kuka a ajouté à son cobot un cercle de Led qui peuvent clignoter, être fixes ou éteintes, et afficher différentes couleurs. Le rouge indique un défaut, le bleu informe qu'il manque une pièce… En plus du type de témoins intégrés aux robots, « il faut démystifier la technologie,expliquer son fonctionnement, la façon dont la sécurité est gérée », argumente Emmanuel Bergerot. « Les cobots ont contribué à changer l'image de la robotique auprès des entreprises , résume Jacques Dupenloup (Stäubli). Elle n'est plus réservée au secteur automobile, ou aux productions de grandes séries.Elle convient par sa flexibilité aux entreprises dont la production est amenée à changer régulièrement. » Mais la robotique collaborative n'en est encore qu'à ses débuts et n'est pas la solution à toutes les situations.Avant de faire ce choix, « il faut donc penser les choses de manière globale, et considérer toute la palette de solutions possibles », conseille Emmanuel Bergerot (Kuka).